Object's 6D Position Estimation
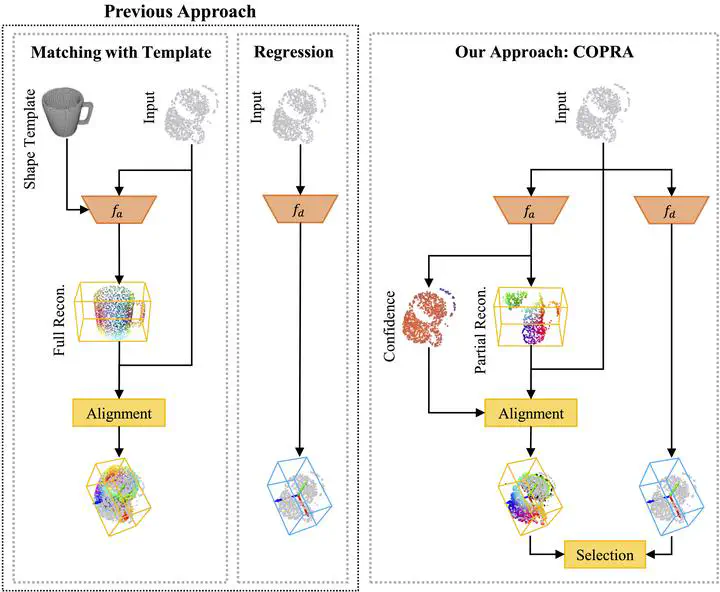
A robust object pose estimation method requires no addition label to explicitly separate noise and valid points. Our method can determine which part of point cloud is noise and which part is data without the need for labels.
Hao ZHENG
Ph.D. candidate of AI
My research interests include transfer learning, few-shot classification and representation learning.